V curves and inverted v curves of synchronous motor
The graphs obtained by plotting the armature current and field current of a synchronous motor are called the V curves. Similarly, the inverted V curves give the relation between the power factor and field current.
In order to understand the V curves, it is essential to know the working and behavior of the synchronous motor. It rotates at a synchronous speed irrespective of the load. The variation in field current affects the armature current and power factor when the motor is operated at a constant load.
The power input to the motor is almost constant for a constant load except for a small change in copper loss and core loss. It is just because of the change in armature current and the flux produced respectively.
V curves of synchronous motor
The power drawn by the synchronous motor is given by
![\[P = \sqrt{3 V_{L} I_{L} Cos \phi \]](https://www.electrically4u.com/wp-content/ql-cache/quicklatex.com-f24403bb8fc99ca4c93d2388c04f08c0_l3.png "Rendered by QuickLaTeX.com")
Since the input power P and the supply voltage V is constant, the decrease in power factor will cause an increase in armature current and vice versa.
Thus the variation in field current causes the variation in armature current. The curves drawn between these two parameters are known as the ‘V curve’ due to their shape being similar to the English letter ‘V’. When such a curve is plotted for different constant loads, we get different ‘V curves of synchronous motor’.
The V curves for no load, half load, and full load are shown in the below figure.
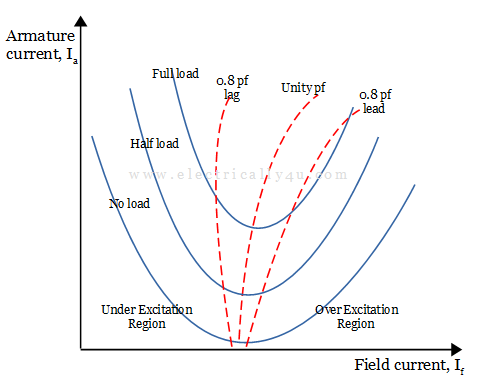
From the V curves of the synchronous motor, it is observed that with a low value of field current, the armature current is large and lagging. This region is known as under excitation region, where the field current is lower than the normal value.
As the field current is increased, the power factor increases, so the armature current decreases to a minimum value. At the value of minimum armature current, the power factor will be unity.
The corresponding field current is known as the normal field current and this region is known as the normal excitation region of the motor. The point at which the unity power factor occurs is shown by the dotted curve.
If the field current is increased further, the power factor increases and becomes leading. So the armature current begins to increase. This region of the leading power factor is known as over excitation region. In this region, the field current is more than the normal value.
Inverted V curves of synchronous motor
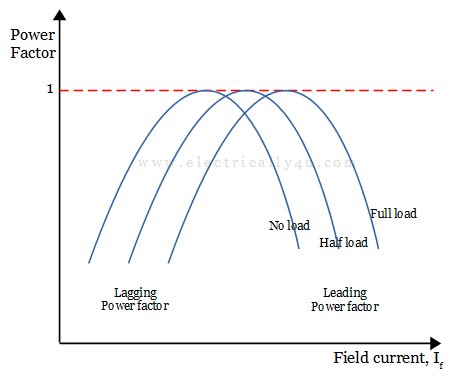
If the variation of power factor is plotted against the variation in field current for a different constant load, the curves obtained are known as the Inverted V curves of a synchronous motor. It is shown in the following figure.
The over-excited motor runs with a leading power factor and the under-excited motor runs with a lagging power factor. Under the normal excitation, the motor operates at the unity power factor. The peak point on each curve indicates the unity power factor.
An ever excited motor is extremely useful for phase advancing purposes, i.e., for power factor correction in the case of industrial loads. The transformers and induction motors in industries draw lagging currents from the line. To make it
Experimental setup
Using a two-wattmeter method setup for a synchronous motor, V curves can be determined for different load conditions. The synchronous machine is coupled with the shunt wound DC machine.
Initially, the dc machine is started as a motor by giving supply to the field winding. When the motor attains the synchronous speed, the field for the synchronous machine is energized. By that time, the motor achieves synchronism.
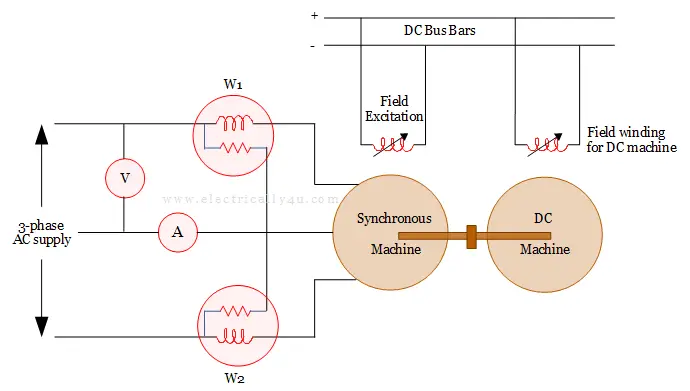
Once this is done, the supply to the dc motor is stopped and so it acts as a load for the synchronous motor. On no-load, measure the readings of the ammeter, voltmeter, and wattmeter for different values of field excitation.
Now the DC generator is loaded so that the motor is loaded to about half of the load. Keeping the load constant, measure the parameters in the meter for different excitation. Repeat the process for full load also. When the measured readings are plotted in a graph, you will get the V curves of the synchronous motor.

Related Posts